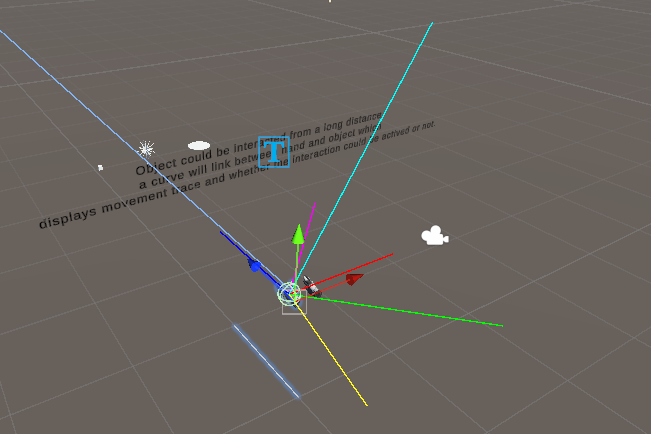
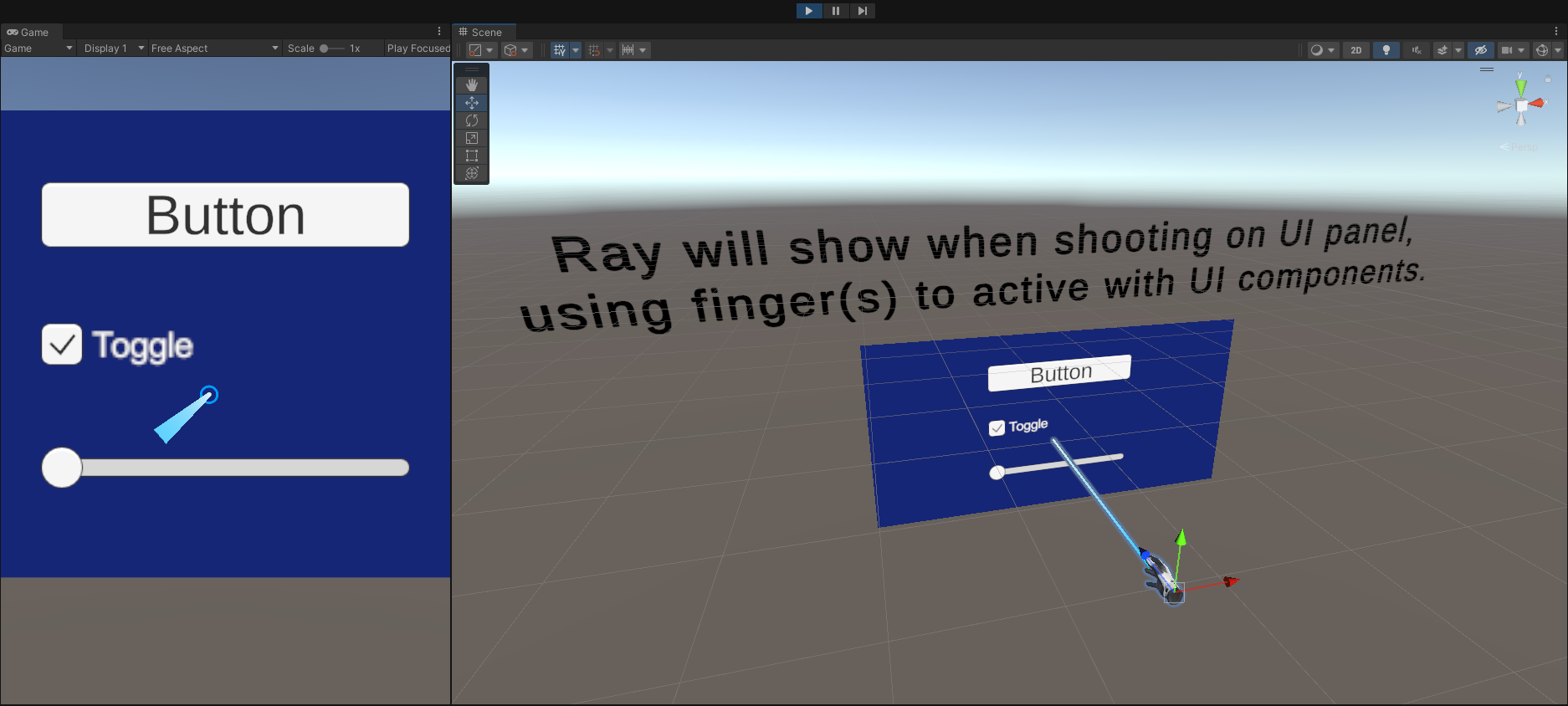
| V2.0 | - 增加远距离交互
- 增加交互物体轮廓线提示及交互触发音效
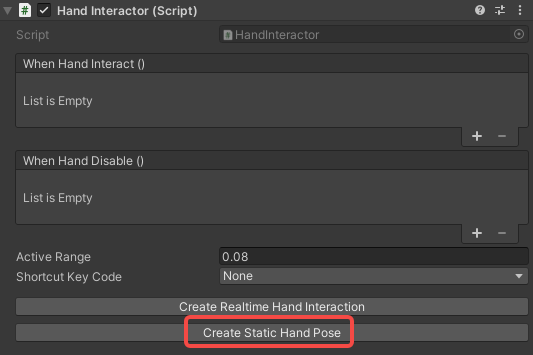
- 增加静态手势识别
- 优化多处交互逻辑,修正bug,增加处理工具
- (重要) 更新适配Pico SDK 3.3版本(仅在Pico集合版)
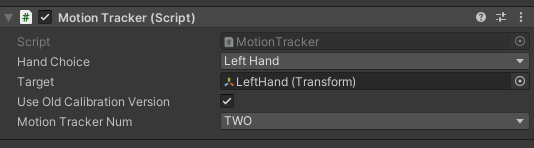
- 提供新的Swift定位方案参数(仅在Pico集合版)
|
| V1.5 | - 蓝牙Pico集合版已迭代为Pico集合版(增加设备连接方式)
- 增加控制器应用实例
- 数据接收及回传插件更新
- 增加标定数据记录
- 更改交互核心脚本图标
- UI界面语言更改为英文
|
| V1.4.3 | - 优化大拇指活动表现(仅在蓝牙Pico集合版)
|
| V1.4.2 | - 修正手部模型在VR中可能会出现的穿模问题(仅在蓝牙Pico集合版)
|
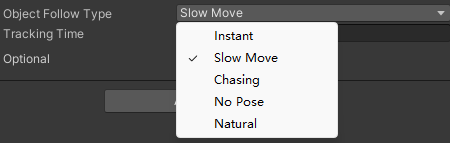
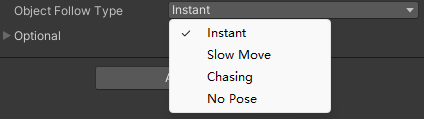
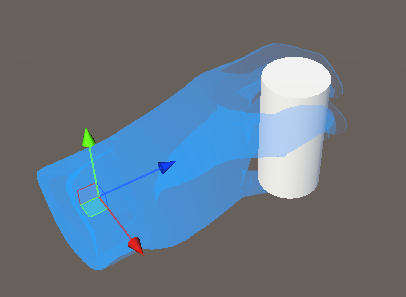
| V1.4.1 | - 修正物理手在各种Objectfollowtype下的表现,修正原始非物理手在natural交互方式的表现
- 修正实例体中HandInteractor脚本上Active Range的数值错误
- 示例UI增加检测双手连接才能继续流程的限制,增加手势动作标定后的摇杆范围标定(仅在蓝牙Pico集合版)
- 优化蓝牙版手套的表现(仅在蓝牙Pico集合版)
- (重要) 更新适配Pico SDK 3.1版本(仅在蓝牙Pico集合版)
|
| V1.4 | - 增加物理手与物理性质交互
- 增加可交互物体的物理属性应用选项及参数调整
- 修复了RegularShapeFit功能触发不正确的问题
- VR Base UI增加高度调节选项(仅在蓝牙Pico集合版)
|
| V1.3.3 | - 修复了InteractableObject脚本上Unity Event监听无效的问题。
|
| V1.3.2 | - 修复了程序在正常运行时会短时间后崩溃闪退的BUG。(仅在蓝牙Pico集合版)
|
| V1.3.1 | - 修正了V1.3中的一个交互无法触发BUG。
|
| V1.3 | - 替换SDK内左右手模型为新标准姿态,虚拟手的食指及小指所有关节增加偏航调整。
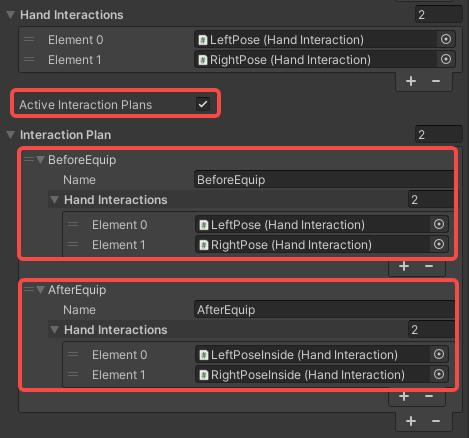
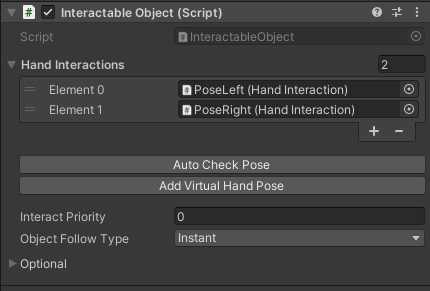
- InteractObject脚本迭代:增加物体交互与交互完成时的UnityEvent监听、增加组合交互方案切换功能与接口、增加交互锁接口、更改手势检测按钮逻辑。
- Hand Interactor脚本迭代:增加强制更改当前交互手势方法
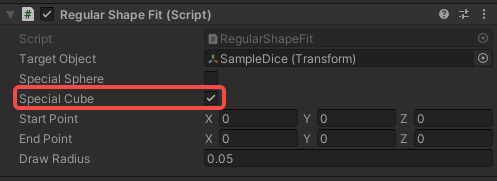
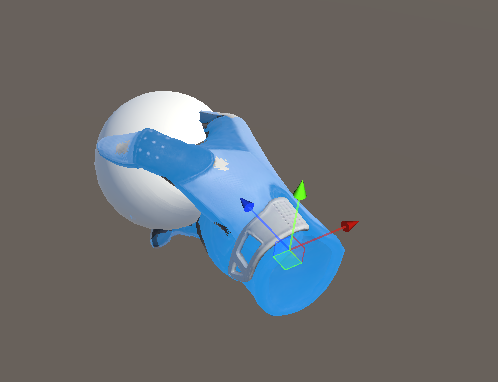
- RegularShapeFit脚本增加SpecialCube选项,可自适应适配立方体上的任意角度交互。
- HandController插件已迭代为适配HandDriver2.1.2版本。
- VR Base UI 增加手套连接选择页面。
- 修正若干交互Bug
|
| V1.2 | - 调整SDK内左右手模型初始姿态。
|
| V1.1 | - 增加蓝牙手套算法适配。
|
| V1.0 | - 发布版,说明内容请见下文
|